Construction
Two of the founders of the company have a long background in the construction industry with a focus on products and projects for improving quality and ergonomics. Bo Glimskär is today a researcher at KTH but still active in the company. The research projects (plastering robot and demolition robot) that led to the start of the company where also focused on the construction industry.
While the company has a long history in construction robotics, the industry itself is only now catching up and we're looking forward to a future filled with interesting projects.
Plastering Robot
The autonomous plastering robot project started as a research project at Luleå University of Technology even before the company was founded.
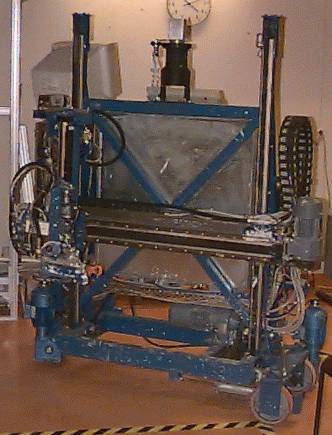
The aim of the project was to reduce the ergonomic problems and the costs for spray plastering of interior walls. The project resulted in a mobile robot with a robot arm for spray plastering and a range measuring laser scanner for positioning, measuring the dimensions of the room and the layout of windows and doors on the walls. The robot, shown below, worked well in tests but it never took of commercially.




Nuclear decommissioning robot
Together with Brokk AB and Luleå University of Technology Mobile Robotics has developed an optronic control system for controlling the Brokk hydraulic arms automatically. A camera system tracks the positions of reflectors on the hydraulic arm and a computer control system controls the hydraulic actuators. The image below show the robot and the steel cutting application.



Load-Haul Vehicle Automation prestudy
Many LHD vehicles etc are performing repetetive tasks well suited to automation. Even more so when they are operating in hazardous environments. For indoor operations with fork lifts etc there are well established commercial solutions, but for heavier vehicles and outdoor environments there are only narrow niche solutions available. Our company did a prestudy of the potential and the technological issues for this application. We hope to be able to go forward with an actual end-user application in the future.