Sensors
In almost all our work computers or electronics interact with the real world. And almost allways this requires some kind of sensor to detect what happens in the real world! This can be simple like a mechanical switch or highly complex like a 3D laser range scanner with gyros and GPS. Making sense of the sensors is at the core of our business!
Examples
Scans using LS700 long range 2D scanner
Scan of af Chapman in Stockholm using the LS700 laser scanner developed together with Laseroptronix AB. The 3D scan was achieved by slowly rotating the scanner. The image is color coded with darker grays further away. Distance to the ship is around 200m.

The LS700 scanner mounted on a helicopter using the motion of the helicopter as the third axis. Color coded with darker grays further away. The three conductors in the power line can be clearly seen as well as the nearby trees. As the laser gives full 3D coordinates for each point it's easy to compute clearance. The wiggling is due to the motion of the helicopter as no gyro compensation was used in this test.
Railroad profiles from laser scanner
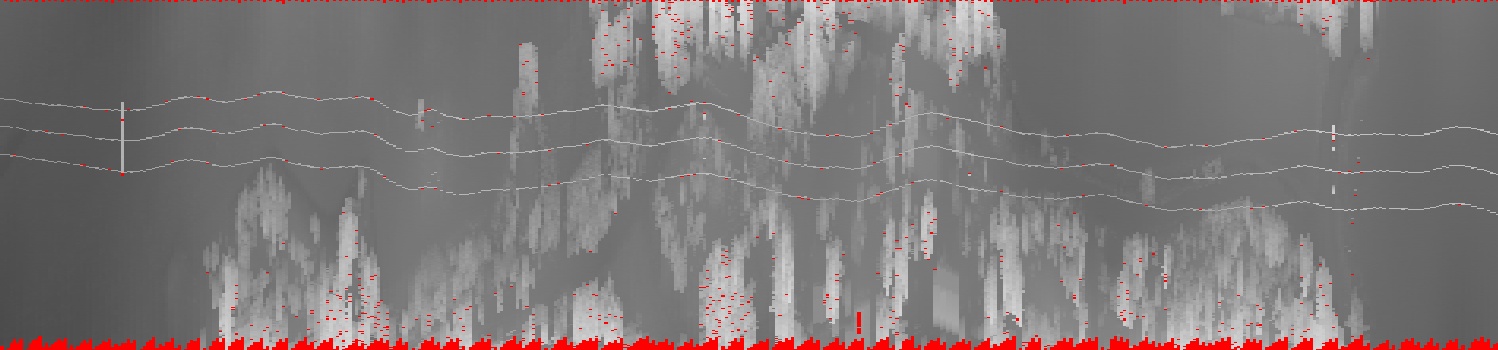
Profile scanned using our BVSCan railroad scanner. The red lines indicate the scan. The colored background shows the desired reference profile.
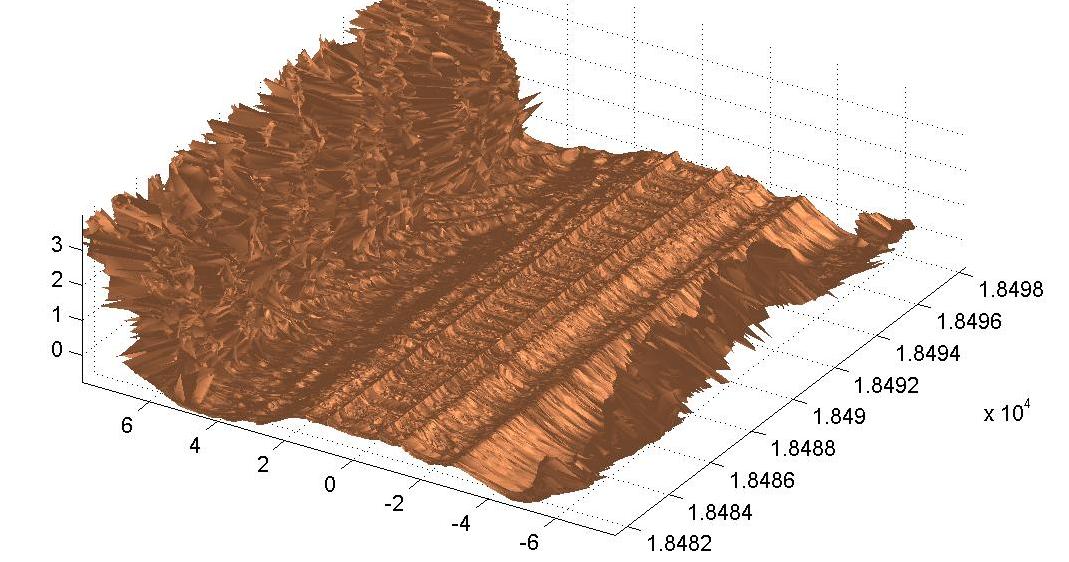
 3D view of track using the BVScan railroad scanner.
3D view of track using the BVScan railroad scanner.
3D scan of plastering robot
Before commercial off the shelf laser scanners became available and affordable, Mobile Robotics developed a laser range scanner. It had a wide field of view (more than half the sphere) with high resolution at an affordable price. Typically the scanner measured 10000 ranges per second and a complete scan was finished in 4 to 40 seconds depending upon desired accurace and sampling density. Maximum range was 15 meters.
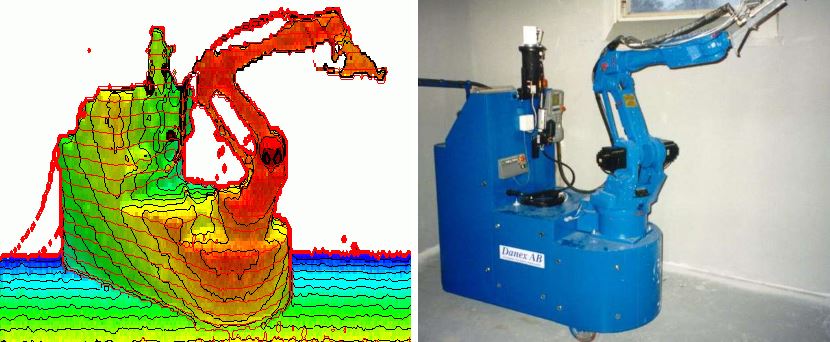 Example of a 3D range scan of our mobile plastering robot and a photo of the robot.
Example of a 3D range scan of our mobile plastering robot and a photo of the robot.
Quickscan
Facial scan using the quickscan scanner developed by us for Luleå University of Technology. The scanner has a max range of 20 meters.
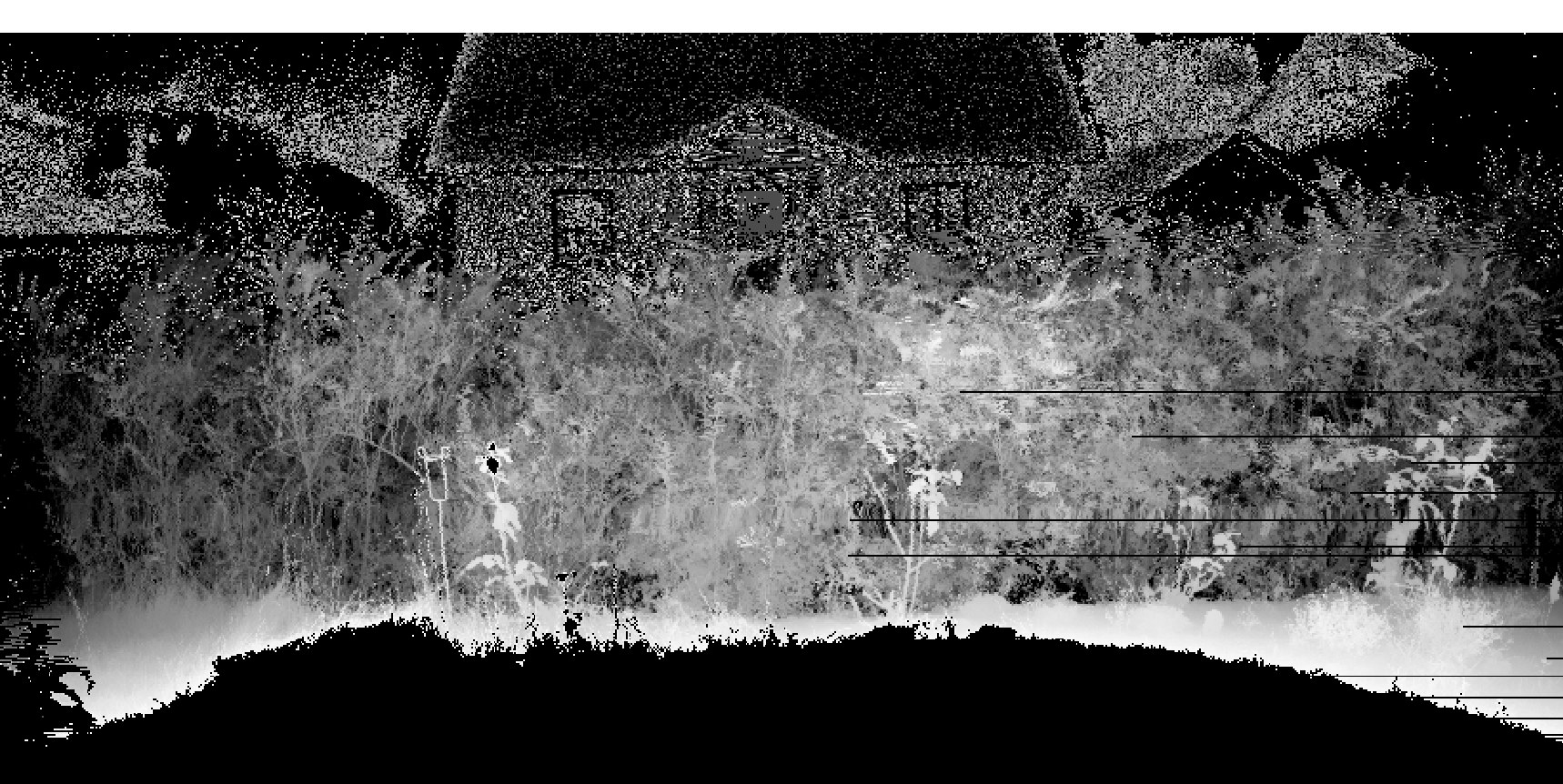
Vegetation scanned using the Quickscan scanner. Range indicated by color, dark is further away. The house in the background shows up as a combination of dropouts and bad measurements - it's actually out of range.
Non-contact sensing technologies
Industrial sensor
We often use standard industrial sensors like photocells, ultrasound rangers, mechanical switches, rotary encoders and force sensors as part of our systems.
Laser scanners (2D)
2D laser scanners measuring range using a laser that's scanned around one axis to create a 2D view of the world. They are a cost effective and higly reliable solution to many problems where the ranges varies from around 1 to 1000 meters. 2D laser scanners give real time data, often up to 100 scans per second, enough to use as feedback for most control tasks.
An alternative solution involves the scanner moving along a linear actuator. This technology is used for our RailScan railroad scanner.
Laser scanners (2.5D)
By using the inherent motion of a machine a 2D scanner can be used to create a 3D model of the world. Examples include:
- Vertically mounted scanner on a railroad vehicle.
- Scanner mounted above a conveyor belt giving a 3D profile of the material on the belt.
- Scanner mounted under an airplane or helicopter creating a 3D terrain model.
Laser scanners (3D)
Full 3D laser range scanners use a range measuring laser and two axis of movement to direct the laser. In our Quickscan the laser beam is deflected by a rotating mirror around one axis and the entire 2D scanner is tilted around the other axis. 3D scanners generally are too slow for realtime feedback control.
Range camera (triangulating)
Range camera (time-of-flight/phase-shift)
Ultrasound tracking
The most common use of ultrasound is to measure range by sending an sound pulse (ping) and measuring the time to the echo.
We have also used ultrasound as a motion tracking system where a number of fixed recievers listen to one or more moving transmitters. By measuring the travel time for the sound and triangulating the position of the transmitters relative to the recievers can be computed.